PCASim: Promptable Closed-loop Adversarial Simulation for Urban Traffic Environment
Abstract
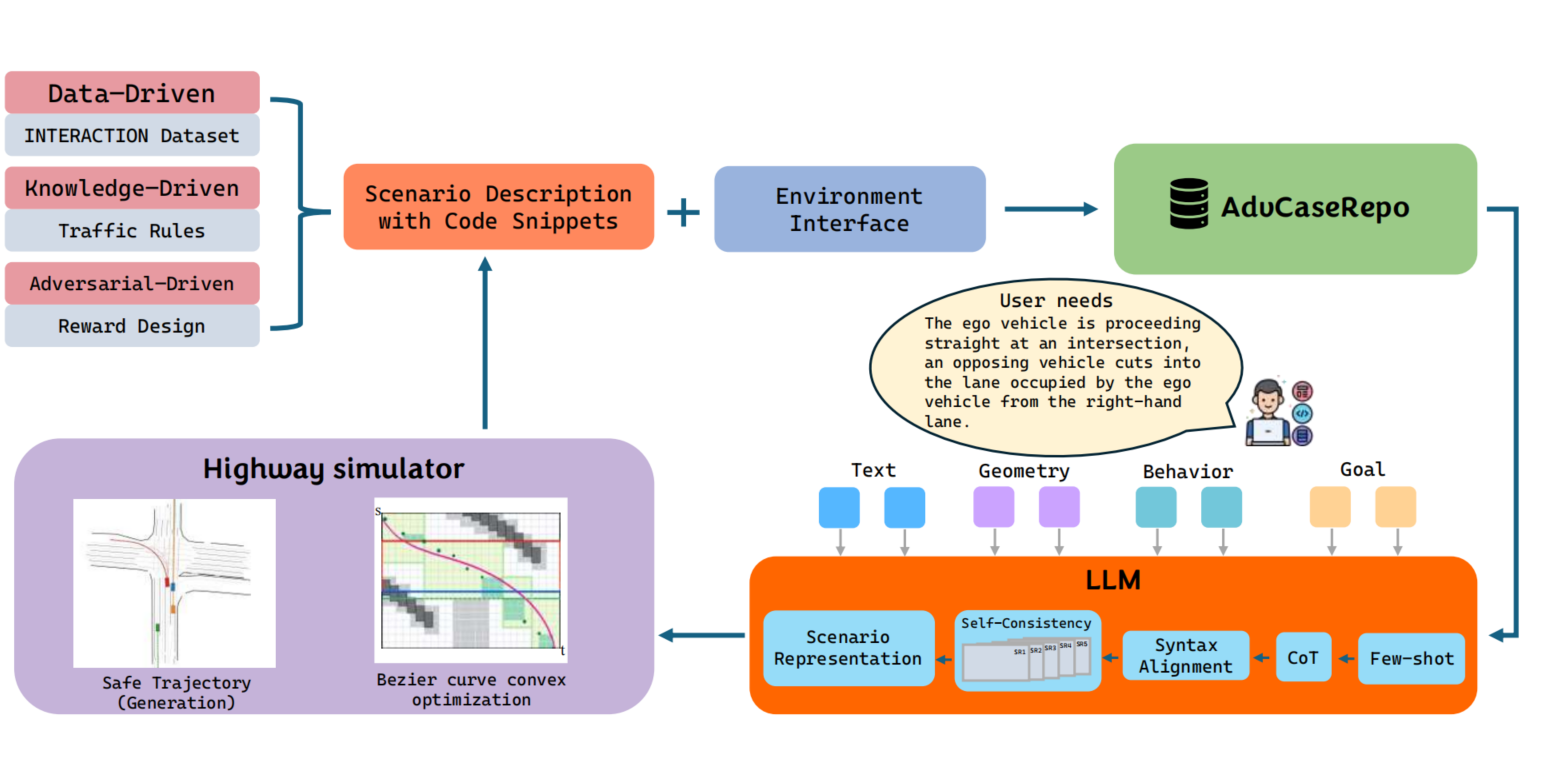
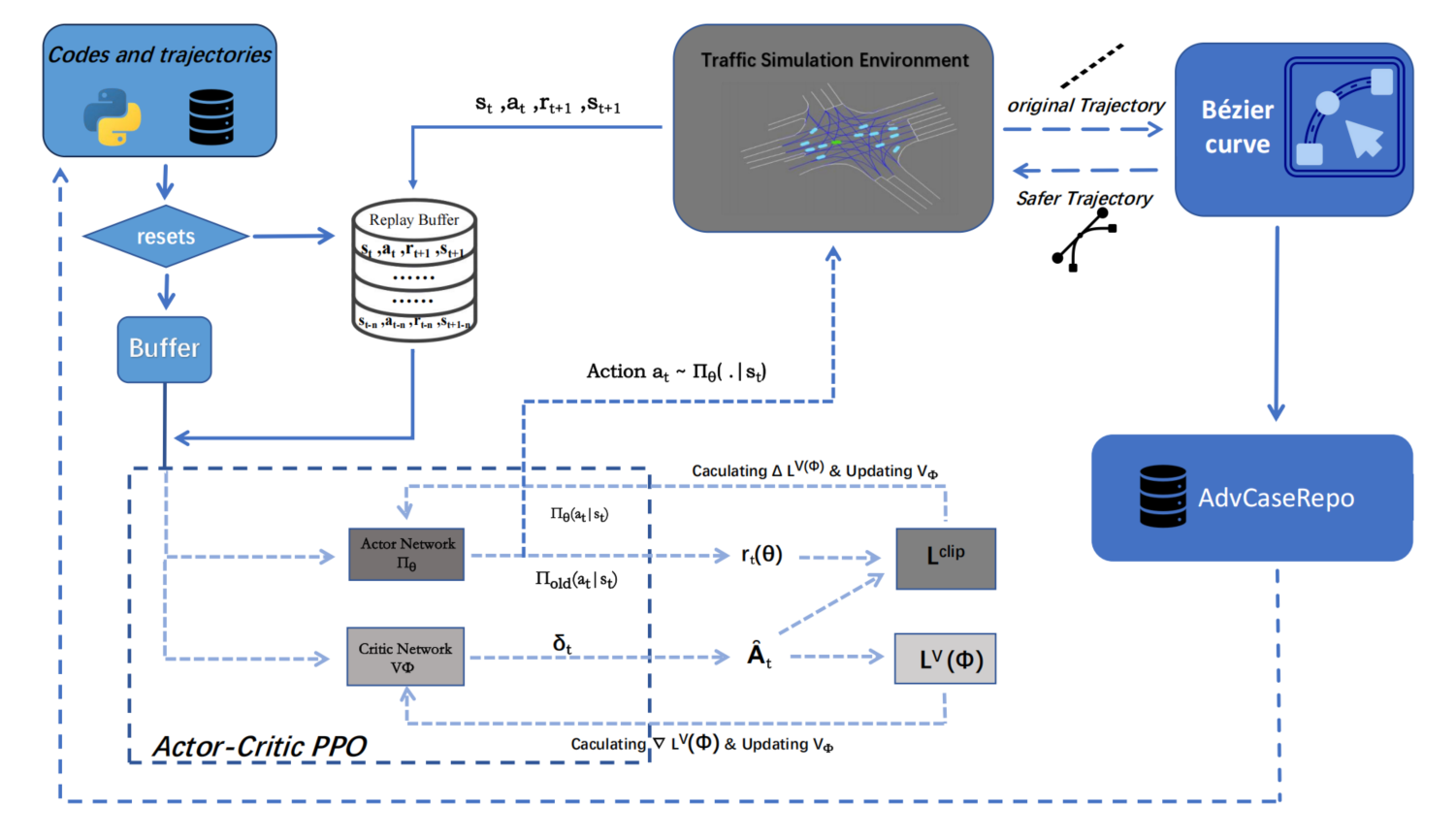
Real-world autonomous driving, particularly in urban environments with numerous corner cases, requires rigorous testing to ensure product safety and robustness. However, there have been very few studies to explore integrating adversarial scenario generation with scenario validation in closed-loop testing to assess scenario plausibility. To address this challenge, an adversarial behavior knowledge repository is constructed by applying rule-based filtering to an open-source dataset, combined with knowledge retrieval modules tailored for simulation environments. A large language model (LLM) is employed to integrate knowledge-, data-, and adversarial-driven approaches, generating safety-critical traffic scenarios customized to user needs. Additionally, a reinforcement learning model is trained to evaluate the generated scenarios, effectively leveraging the advanced cognitive and reasoning capabilities of LLM, thereby achieving greater scenario diversity beyond existing datasets while maintaining realism. Experimental results demonstrate that the proposed framework can improve the accuracy of domain-specific language generation by 12%, with a 30% conversion success rate for newly generated scenarios.
The framework of newly generated adversarial scenarios.
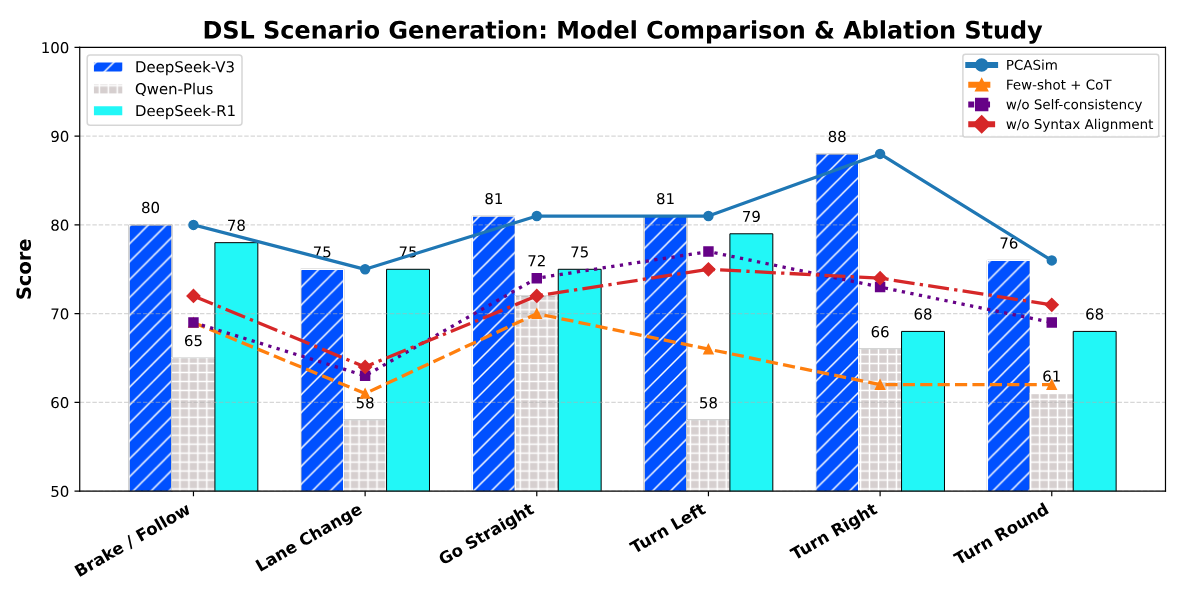
Comparison of DSL scenario generation scores across different LLMs and ablation study of core components in the DSL generation pipeline.
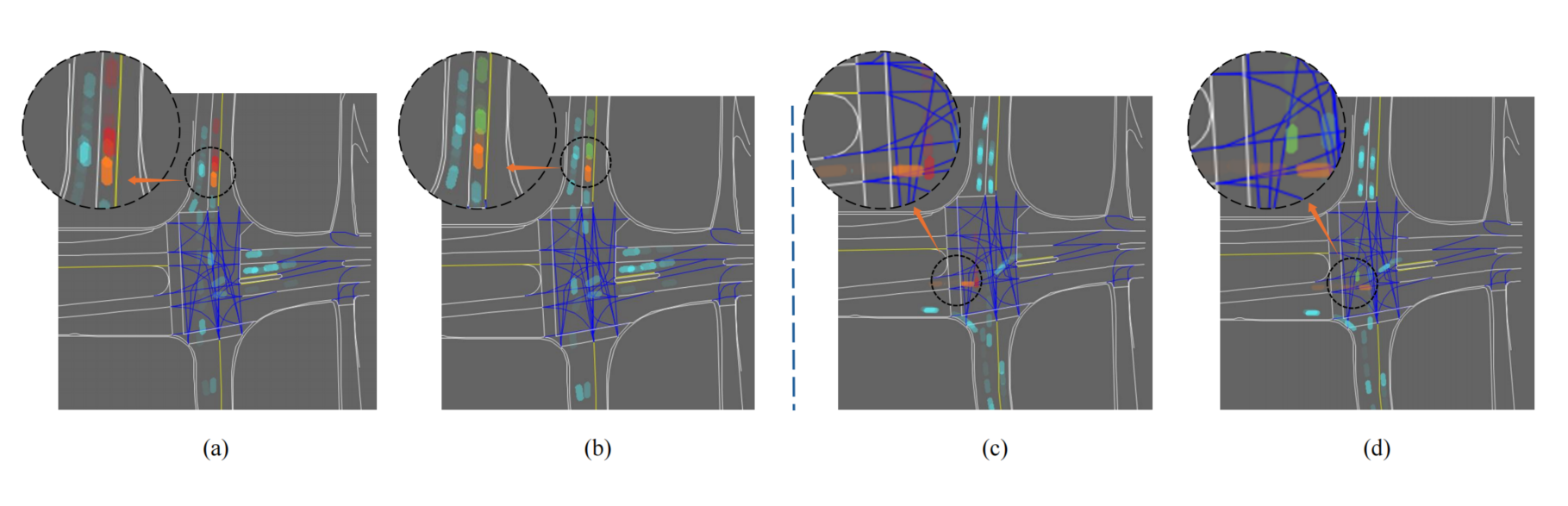
Generating Scenarios and Validation. (a) (b) are the braking scenarios, (c) (d) are the going straight scenarios, the orange indicates adversarial vehicle, the red indicates ego vehicle without training and the green ego vehicle has been strengthened by the reinforcement learning.
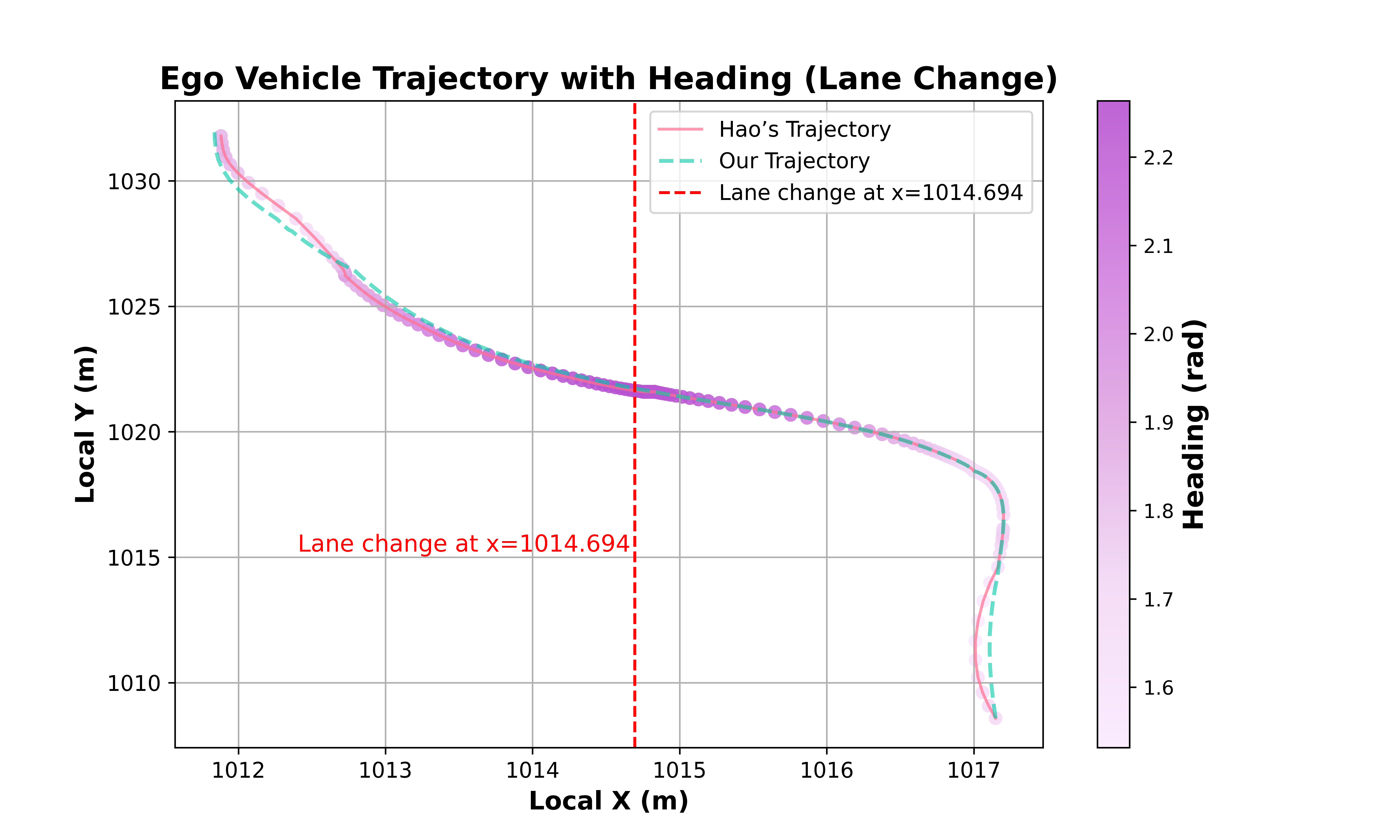
Comparison of the greatest heading trajectories
Video Presentation
BibTeX
@article{YourPaperKey2024,
title={Your Paper Title Here},
author={Anonymous},
journal={Conference/Journal Name},
year={2025},
url={https://your-domain.com/your-project-page}
}